

Introducció de xips de classe de control
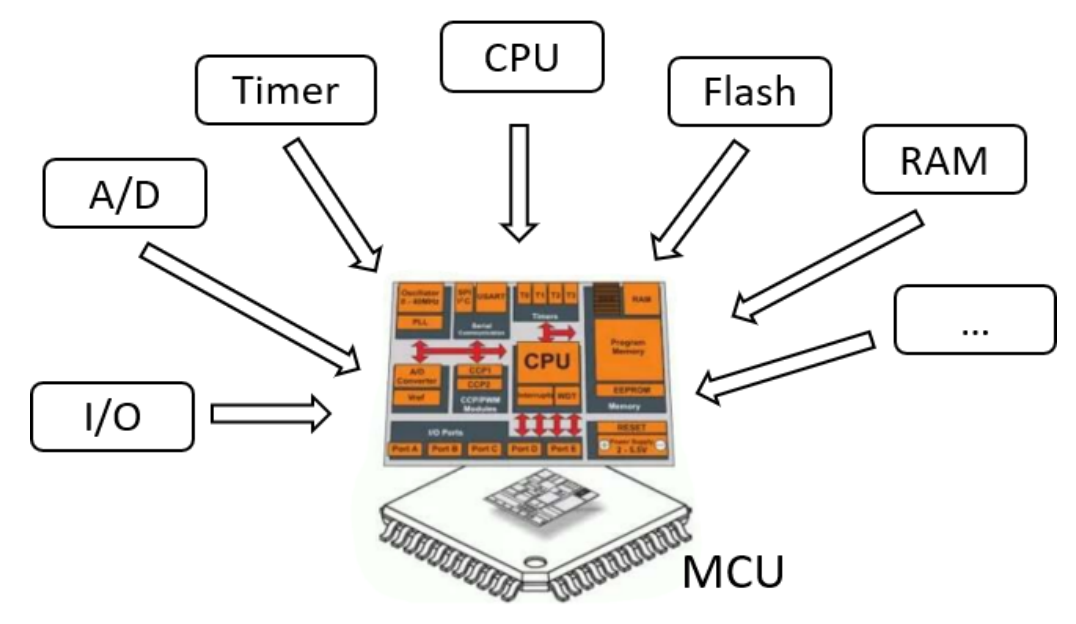
El xip de control es refereix principalment a la MCU (Unitat de Microcontrolador), és a dir, el microcontrolador, també conegut com a xip únic, que redueix la freqüència i les especificacions de la CPU de manera adequada, i integra la memòria, el temporitzador, la conversió A/D, el rellotge, el port d'E/S i la comunicació sèrie i altres mòduls funcionals i interfícies en un sol xip. Realitzant la funció de control del terminal, té els avantatges d'alt rendiment, baix consum d'energia, programabilitat i alta flexibilitat.
Diagrama MCU del nivell de l'indicador del vehicle
L'automoció és una àrea d'aplicació molt important de les MCU. Segons dades d'IC Insights, el 2019 l'aplicació global de MCU en electrònica d'automoció va representar aproximadament el 33%. El nombre de MCUS utilitzats per cada cotxe en models d'alta gamma és proper a 100, des d'ordinadors de conducció i instruments LCD fins a motors, xassís i components grans i petits del cotxe que necessiten control de MCU.
En els primers temps, els MCUS de 8 i 16 bits s'utilitzaven principalment en automòbils, però amb la millora contínua de l'electronització i la intel·ligència dels automòbils, el nombre i la qualitat dels MCUS necessaris també estan augmentant. Actualment, la proporció de MCUS de 32 bits en els MCUS d'automòbils ha arribat a aproximadament el 60%, dels quals el nucli de la sèrie Cortex d'ARM, a causa del seu baix cost i excel·lent control de potència, és l'elecció principal dels fabricants de MCU d'automòbils.
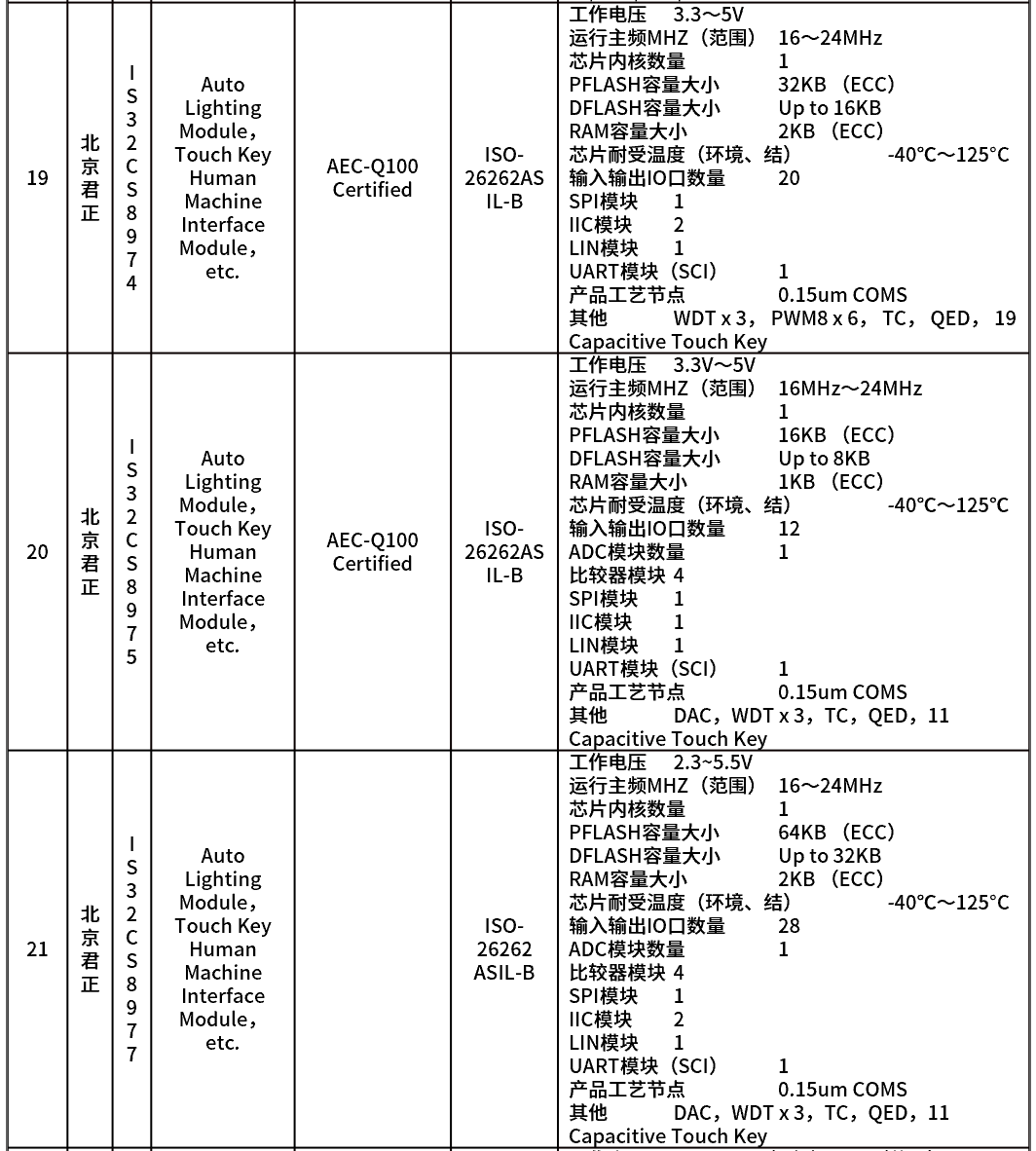
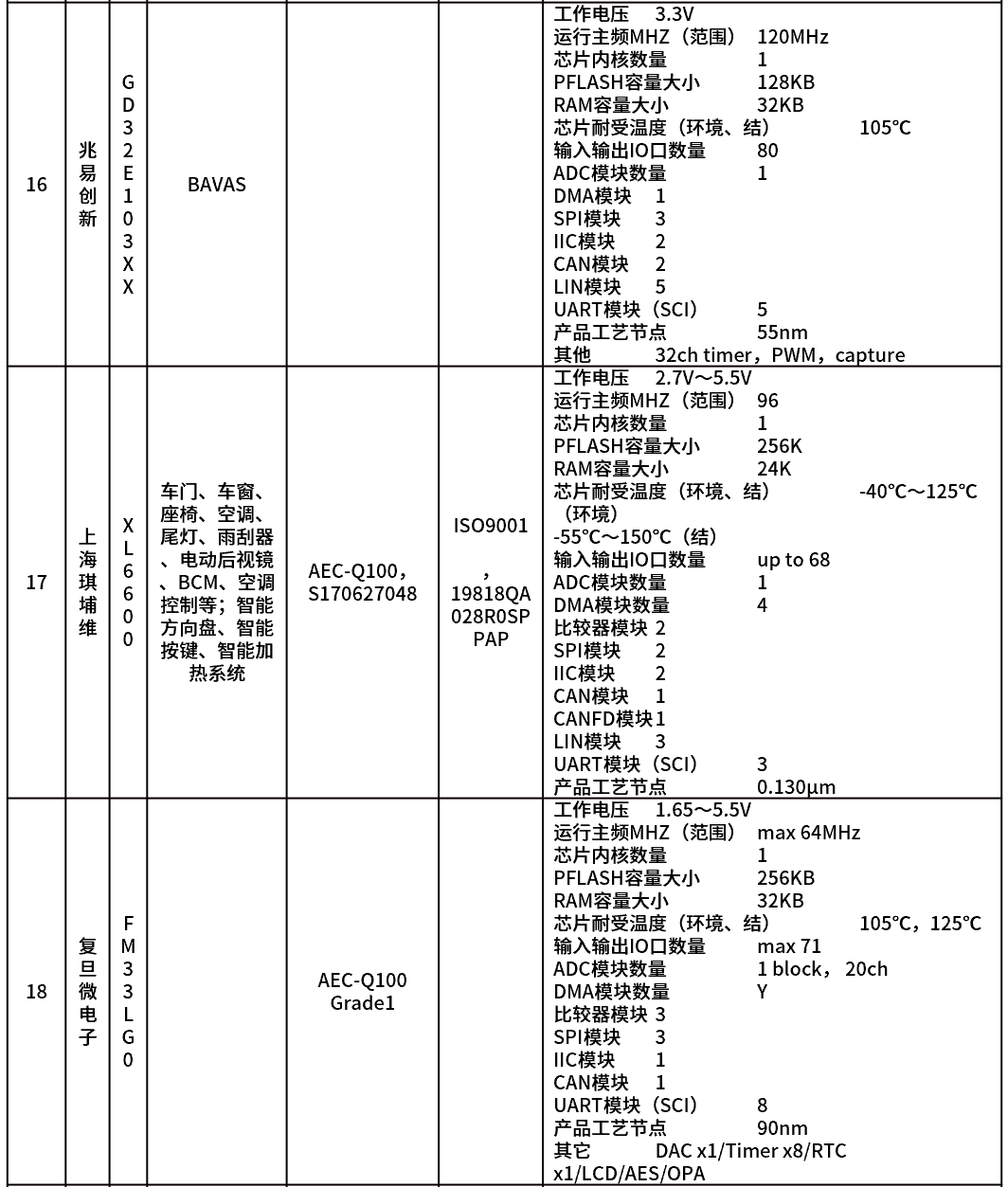
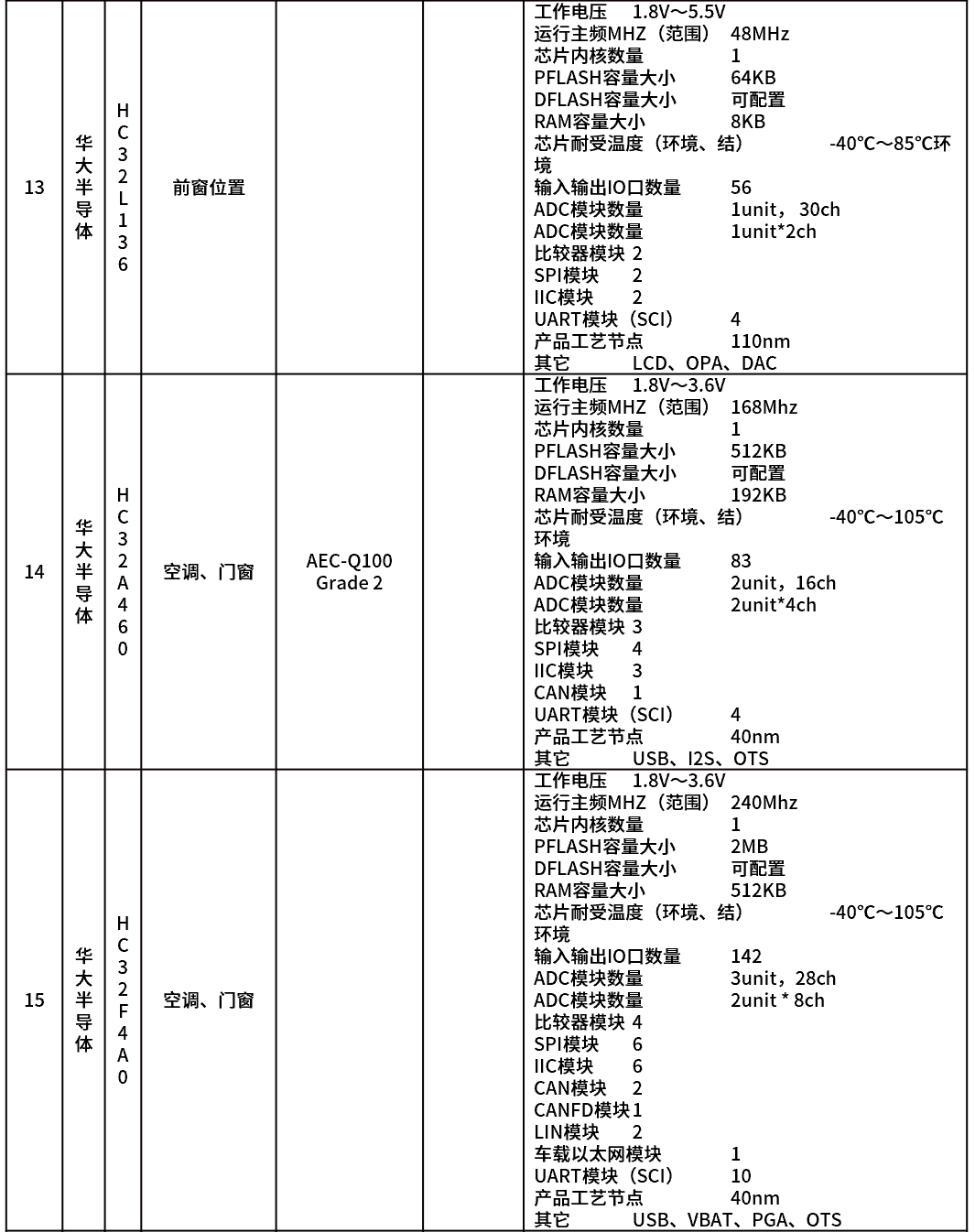
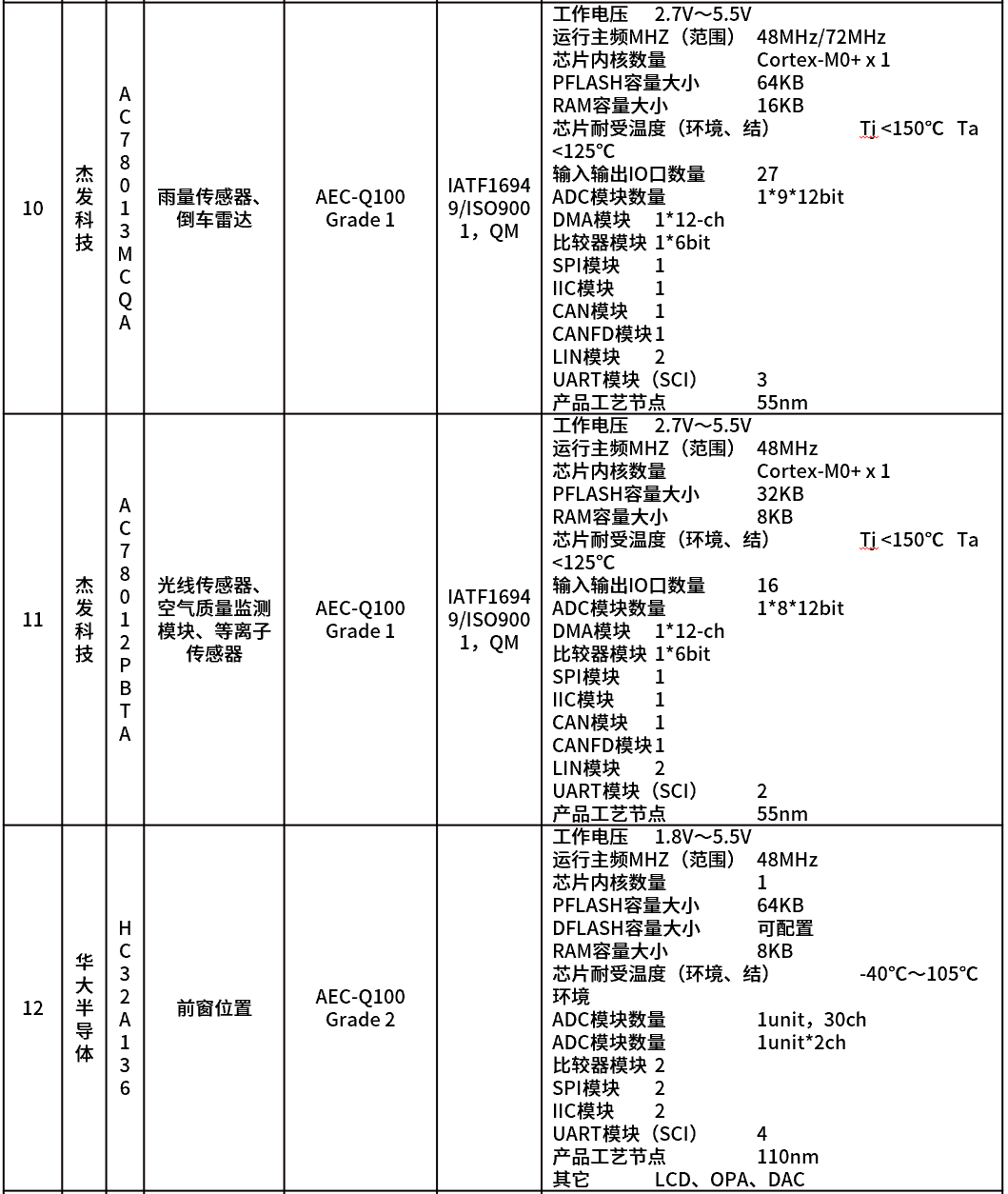
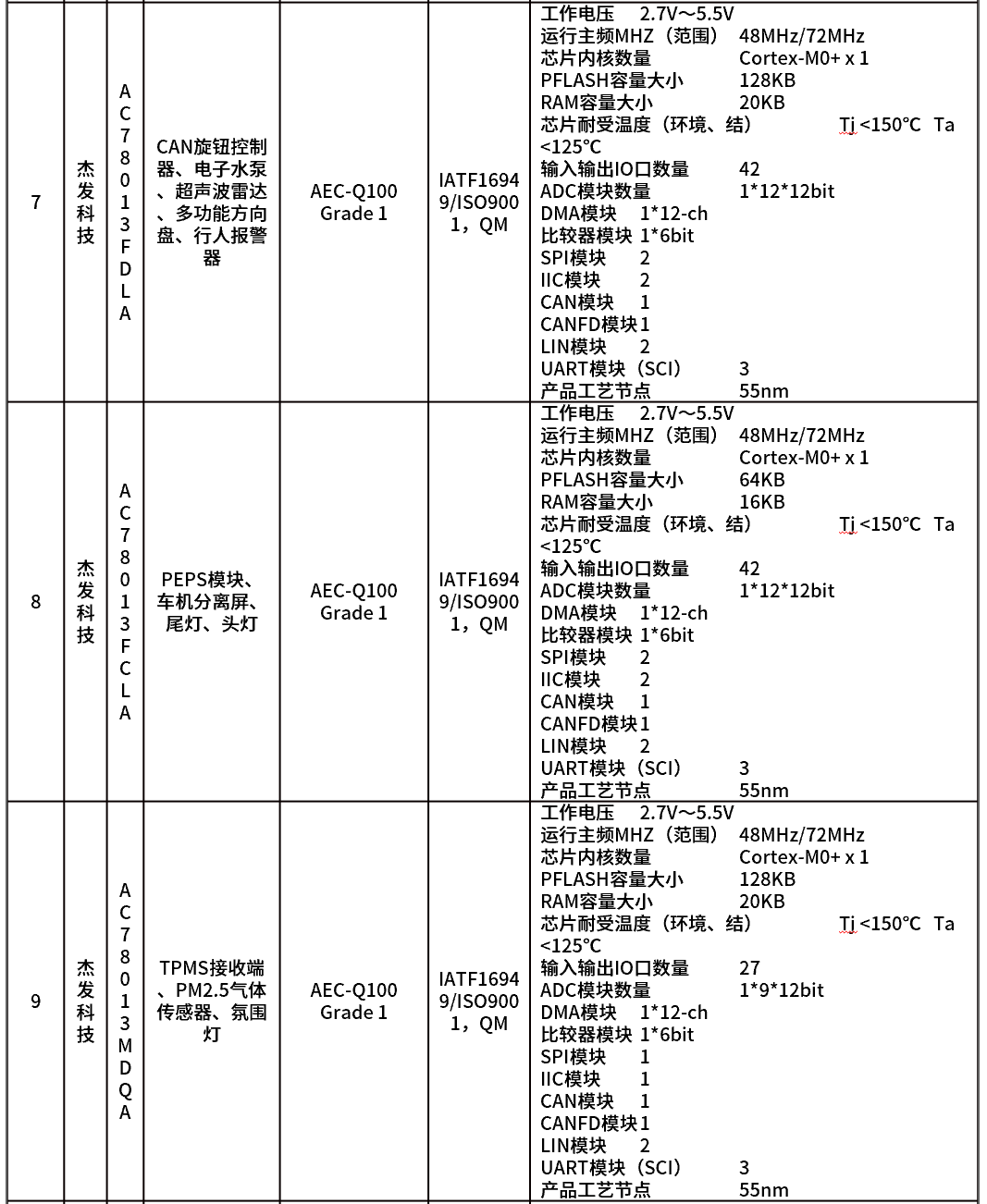
Els paràmetres principals d'un MCU per a automòbils inclouen la tensió de funcionament, la freqüència de funcionament, la capacitat de la memòria flaix i la RAM, el número de mòdul i canal del temporitzador, el número de mòdul i canal de l'ADC, el tipus i el número de la interfície de comunicació sèrie, el número del port d'E/S d'entrada i sortida, la temperatura de funcionament, la forma del paquet i el nivell de seguretat funcional.
Dividits per bits de CPU, els MCUS d'automoció es poden dividir principalment en 8 bits, 16 bits i 32 bits. Amb l'actualització del procés, el cost dels MCUS de 32 bits continua baixant i ara s'han convertit en el corrent principal, i estan substituint gradualment les aplicacions i els mercats dominats en el passat pels MCUS de 8/16 bits.
Si es divideix segons el camp d'aplicació, la MCU de l'automoció es pot dividir en el domini de la carrosseria, el domini de potència, el domini del xassís, el domini de la cabina i el domini de la conducció intel·ligent. Per al domini de la cabina i el domini de la conducció intel·ligent, la MCU necessita tenir una alta potència de càlcul i interfícies de comunicació externes d'alta velocitat, com ara CAN FD i Ethernet. El domini de la carrosseria també requereix un gran nombre d'interfícies de comunicació externes, però els requisits de potència de càlcul de la MCU són relativament baixos, mentre que el domini de potència i el domini del xassís requereixen una temperatura de funcionament i uns nivells de seguretat funcional més elevats.
Xip de control de domini del xassís
El domini del xassís està relacionat amb la conducció de vehicles i està compost pel sistema de transmissió, el sistema de conducció, el sistema de direcció i el sistema de frenada. Està compost per cinc subsistemes, és a dir, la direcció, la frenada, el canvi de marxes, l'accelerador i el sistema de suspensió. Amb el desenvolupament de la intel·ligència automobilística, el reconeixement de la percepció, la planificació de decisions i l'execució del control dels vehicles intel·ligents són els sistemes bàsics del domini del xassís. L'adreça per cable i el drive-by-wire són els components bàsics per a l'execució de la conducció automàtica.
(1) Requisits del lloc de treball
La ECU del domini del xassís utilitza una plataforma de seguretat funcional escalable i d'alt rendiment i admet l'agrupació de sensors i sensors inercials multieix. Basant-nos en aquest escenari d'aplicació, es proposen els requisits següents per a la MCU del domini del xassís:
· Requisits d'alta freqüència i alta potència de càlcul, la freqüència principal no és inferior a 200 MHz i la potència de càlcul no és inferior a 300 DMIPS
· L'espai d'emmagatzematge flash no és inferior a 2 MB, amb codi Flash i partició física Flash de dades;
· RAM no inferior a 512KB;
· Requisits de nivell de seguretat funcional elevats, poden assolir el nivell ASIL-D;
· Suport per a ADC de precisió de 12 bits;
· Suport per a temporitzador d'alta precisió i alta sincronització de 32 bits;
· Suport per a CAN-FD multicanal;
· Suport per a no menys de 100M Ethernet;
· Fiabilitat no inferior a AEC-Q100 Grau 1;
· Suport per a l'actualització en línia (OTA);
· Suport a la funció de verificació del firmware (algoritme secret nacional);
(2) Requisits de rendiment
· Part del nucli:
I. Freqüència del nucli: és a dir, la freqüència de rellotge quan el nucli està en funcionament, que s'utilitza per representar la velocitat d'oscil·lació del senyal de pols digital del nucli, i la freqüència principal no pot representar directament la velocitat de càlcul del nucli. La velocitat de funcionament del nucli també està relacionada amb el pipeline del nucli, la memòria cau, el conjunt d'instruccions, etc.
II. Potència de càlcul: DMIPS normalment es pot utilitzar per a l'avaluació. DMIPS és una unitat que mesura el rendiment relatiu del programa de referència integrat de MCU quan es prova.
· Paràmetres de memòria:
I. Memòria de codi: memòria utilitzada per emmagatzemar codi;
II. Memòria de dades: memòria utilitzada per emmagatzemar dades;
III.RAM: Memòria que s'utilitza per emmagatzemar dades i codi temporals.
· Bus de comunicació: incloent-hi el bus especial per a automòbils i el bus de comunicació convencional;
· Perifèrics d'alta precisió;
· Temperatura de funcionament;
(3) Patró industrial
Com que l'arquitectura elèctrica i electrònica utilitzada pels diferents fabricants d'automòbils variarà, els requisits dels components per al domini del xassís també variaran. A causa de la diferent configuració dels diferents models de la mateixa fàbrica de cotxes, la selecció de la ECU de l'àrea del xassís serà diferent. Aquestes distincions donaran lloc a diferents requisits de MCU per al domini del xassís. Per exemple, el Honda Accord utilitza tres xips MCU de domini del xassís i l'Audi Q7 utilitza uns 11 xips MCU de domini del xassís. El 2021, la producció de turismes de la marca xinesa és d'uns 10 milions, dels quals la demanda mitjana de MCUS de domini del xassís de bicicletes és de 5, i el mercat total ha arribat a uns 50 milions. Els principals proveïdors de MCUS en tot el domini del xassís són Infineon, NXP, Renesas, Microchip, TI i ST. Aquests cinc proveïdors internacionals de semiconductors representen més del 99% del mercat de MCUS de domini del xassís.
(4) Barreres industrials
Des del punt de vista tècnic clau, els components del domini del xassís, com ara l'EPS, l'EPB i l'ESC, estan estretament relacionats amb la seguretat vital del conductor, de manera que el nivell de seguretat funcional de l'MCU del domini del xassís és molt alt, bàsicament els requisits de nivell ASIL-D. Aquest nivell de seguretat funcional de l'MCU no està assolit a la Xina. A més del nivell de seguretat funcional, els escenaris d'aplicació dels components del xassís tenen requisits molt elevats pel que fa a la freqüència de l'MCU, la potència de càlcul, la capacitat de memòria, el rendiment perifèric, la precisió dels perifèrics i altres aspectes. L'MCU del domini del xassís ha format una barrera industrial molt alta, que cal que els fabricants nacionals d'MCU la desafiïn i la superin.
Pel que fa a la cadena de subministrament, a causa dels requisits d'alta freqüència i alta potència de càlcul per al xip de control dels components del domini del xassís, es presenten requisits relativament alts per al procés i el procés de producció de les oblies. Actualment, sembla que es requereix un procés d'almenys 55 nm per complir els requisits de freqüència de l'MCU superiors a 200 MHz. En aquest sentit, la línia de producció nacional d'MCU no està completa i no ha assolit el nivell de producció en massa. Els fabricants internacionals de semiconductors han adoptat bàsicament el model IDM, pel que fa a les foneries d'oblies, actualment només TSMC, UMC i GF tenen les capacitats corresponents. Els fabricants nacionals de xips són totes empreses Fabless, i hi ha reptes i certs riscos en la fabricació d'oblies i l'assegurament de la capacitat.
En escenaris de computació bàsica com la conducció autònoma, les CPU tradicionals d'ús general són difícils d'adaptar als requisits de computació d'IA a causa de la seva baixa eficiència informàtica, i els xips d'IA com les GPU, els FPgas i els ASics tenen un rendiment excel·lent a la vora i al núvol amb les seves pròpies característiques i s'utilitzen àmpliament. Des de la perspectiva de les tendències tecnològiques, la GPU continuarà sent el xip d'IA dominant a curt termini, i a llarg termini, l'ASIC és la direcció definitiva. Des de la perspectiva de les tendències del mercat, la demanda global de xips d'IA mantindrà un ràpid impuls de creixement, i els xips al núvol i a la vora tenen un major potencial de creixement, i s'espera que la taxa de creixement del mercat sigui propera al 50% en els propers cinc anys. Tot i que la base de la tecnologia de xips nacional és feble, amb el ràpid desembarcament de les aplicacions d'IA, el ràpid volum de demanda de xips d'IA crea oportunitats per al creixement de la tecnologia i la capacitat de les empreses locals de xips. La conducció autònoma té requisits estrictes sobre la potència de càlcul, el retard i la fiabilitat. Actualment, s'utilitzen principalment solucions GPU + FPGA. Amb l'estabilitat dels algoritmes i basats en dades, s'espera que els ASics guanyin espai al mercat.
Es necessita molt d'espai al xip de la CPU per a la predicció i optimització de ramificacions, estalviant diversos estats per reduir la latència del canvi de tasques. Això també el fa més adequat per al control lògic, l'operació en sèrie i l'operació de dades de tipus general. Prenguem com a exemple la GPU i la CPU: en comparació amb la CPU, la GPU utilitza un gran nombre d'unitats de càlcul i un llarg pipeline, només una lògica de control molt simple i elimina la memòria cau. La CPU no només ocupa molt d'espai a la memòria cau, sinó que també té una lògica de control complexa i molts circuits d'optimització, en comparació amb la potència de càlcul que només és una petita part.
Xip de control de domini de potència
El controlador de domini de potència és una unitat intel·ligent de gestió del tren motriu. Amb CAN/FLEXRAY per aconseguir la gestió de la transmissió, la gestió de la bateria, la supervisió de la regulació de l'alternador, s'utilitza principalment per a l'optimització i el control del tren motriu, alhora que el diagnòstic intel·ligent de fallades elèctriques, l'estalvi intel·ligent d'energia, la comunicació per bus i altres funcions.
(1) Requisits del lloc de treball
La MCU de control de domini d'energia pot admetre les principals aplicacions d'energia, com ara BMS, amb els requisits següents:
· Alta freqüència principal, freqüència principal 600MHz ~ 800MHz
· 4 MB de memòria RAM
· Requisits de nivell de seguretat funcional elevats, poden assolir el nivell ASIL-D;
· Suport per a CAN-FD multicanal;
· Suport per a Ethernet 2G;
· Fiabilitat no inferior a AEC-Q100 Grau 1;
· Suport a la funció de verificació del firmware (algoritme secret nacional);
(2) Requisits de rendiment
Alt rendiment: El producte integra la CPU ARM Cortex R5 de doble nucli amb bloqueig i 4 MB de SRAM en xip per donar suport a la creixent potència de càlcul i els requisits de memòria de les aplicacions d'automoció. CPU ARM Cortex-R5F de fins a 800 MHz. Alta seguretat: L'estàndard de fiabilitat de les especificacions del vehicle AEC-Q100 arriba al grau 1, i el nivell de seguretat funcional ISO26262 arriba a ASIL D. La CPU de doble nucli amb bloqueig pot aconseguir una cobertura de diagnòstic de fins al 99%. El mòdul de seguretat de la informació integrat integra un generador de nombres aleatoris real, AES, RSA, ECC, SHA i acceleradors de maquinari que compleixen amb els estàndards pertinents de seguretat estatal i empresarial. La integració d'aquestes funcions de seguretat de la informació pot satisfer les necessitats d'aplicacions com ara l'inici segur, la comunicació segura, l'actualització i l'actualització segura del firmware.
Xip de control de l'àrea corporal
La zona de la carrosseria és principalment responsable del control de diverses funcions de la carrosseria. Amb el desenvolupament del vehicle, el controlador de la zona de la carrosseria també és cada cop més important. Per tal de reduir el cost del controlador i reduir el pes del vehicle, la integració necessita posar tots els dispositius funcionals, des de la part davantera, la part central del cotxe i la part posterior del cotxe, com ara el llum de fre posterior, el llum de posició posterior, el pany de la porta posterior i fins i tot la integració unificada de la vareta de doble tirant en un controlador total.
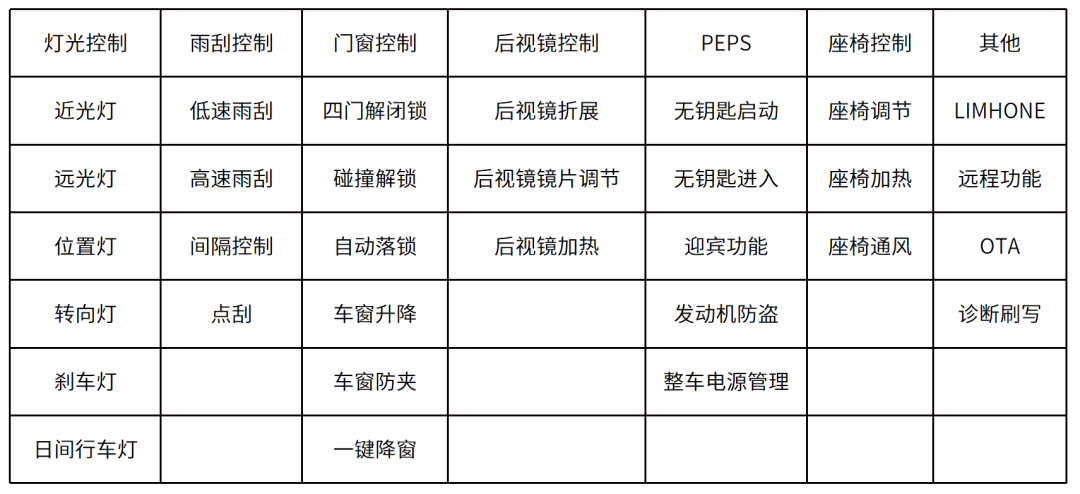
El controlador d'àrea corporal generalment integra funcions BCM, PEPS, TPMS, Gateway i altres, però també pot ampliar l'ajust del seient, el control del retrovisor, el control de l'aire condicionat i altres funcions, una gestió completa i unificada de cada actuador i una assignació raonable i eficaç dels recursos del sistema. Les funcions d'un controlador d'àrea corporal són nombroses, com es mostra a continuació, però no es limiten a les que s'enumeren aquí.
(1) Requisits del lloc de treball
Les principals demandes de l'electrònica d'automoció per als xips de control MCU són una millor estabilitat, fiabilitat, seguretat, característiques tècniques en temps real i altres, així com un major rendiment informàtic i capacitat d'emmagatzematge, i uns requisits d'índex de consum d'energia més baixos. El controlador d'àrea de la carrosseria ha anat passant gradualment d'un desplegament funcional descentralitzat a un controlador gran que integra totes les unitats bàsiques de l'electrònica de la carrosseria, funcions clau, llums, portes, finestres, etc. El disseny del sistema de control de l'àrea de la carrosseria integra il·luminació, rentat d'eixugaparabrises, panys de portes de control centralitzat, finestres i altres controls, claus intel·ligents PEPS, gestió d'energia, etc. Així com la porta d'enllaç CAN, CANFD i FLEXRAY extensibles, la xarxa LIN, la interfície Ethernet i la tecnologia de desenvolupament i disseny de mòduls.
En general, els requisits de treball de les funcions de control esmentades anteriorment per al xip de control principal de la MCU a la zona de la carrosseria es reflecteixen principalment en els aspectes del rendiment de la computació i el processament, la integració funcional, la interfície de comunicació i la fiabilitat. Pel que fa als requisits específics, a causa de les diferències funcionals en els diferents escenaris d'aplicació funcional a la zona de la carrosseria, com ara els elevalunes elèctrics, els seients automàtics, el portó posterior elèctric i altres aplicacions de carrosseria, encara hi ha necessitats de control del motor d'alta eficiència, aquestes aplicacions de carrosseria requereixen que la MCU integri l'algoritme de control electrònic FOC i altres funcions. A més, els diferents escenaris d'aplicació a la zona de la carrosseria tenen requisits diferents per a la configuració de la interfície del xip. Per tant, normalment cal seleccionar la MCU de la zona de la carrosseria segons els requisits funcionals i de rendiment de l'escenari d'aplicació específic i, sobre aquesta base, mesurar exhaustivament el rendiment del cost del producte, la capacitat de subministrament i el servei tècnic i altres factors.
(2) Requisits de rendiment
Els principals indicadors de referència del xip MCU de control de l'àrea corporal són els següents:
Rendiment: ARM Cortex-M4F a 144 MHz, 180 DMIPS, memòria cau d'instruccions de 8 KB integrada, suport per a l'execució de la unitat d'acceleració Flash amb temps d'espera 0.
Memòria xifrada de gran capacitat: fins a 512K Bytes d'eFlash, compatible amb emmagatzematge xifrat, gestió de particions i protecció de dades, compatible amb la verificació ECC, 100.000 vegades d'esborrat, 10 anys de retenció de dades; 144K Bytes de SRAM, compatible amb paritat de maquinari.
Interfícies de comunicació riques integrades: compatible amb GPIO multicanal, USART, UART, SPI, QSPI, I2C, SDIO, USB2.0, CAN 2.0B, EMAC, DVP i altres interfícies.
Simulador d'alt rendiment integrat: compatible amb ADC d'alta velocitat de 12 bits i 5 Msps, amplificador operacional independent de carril a carril, comparador analògic d'alta velocitat, DAC de 12 bits i 1 Msps; compatible amb una font de voltatge de referència independent d'entrada externa, tecla tàctil capacitiva multicanal; controlador DMA d'alta velocitat.
Admet entrada de rellotge de cristall RC interna o externa, reinici d'alta fiabilitat.
Calibratge integrat del rellotge RTC en temps real, suport per a calendari perpetu d'anys de traspàs, esdeveniments d'alarma, despertador periòdic.
Suport per a comptadors de temps d'alta precisió.
Funcions de seguretat a nivell de maquinari: motor d'acceleració de maquinari d'algoritmes de xifratge, compatible amb algoritmes AES, DES, TDES, SHA1/224/256, SM1, SM3, SM4, SM7, MD5; Xifratge d'emmagatzematge flash, gestió de particions multiusuari (MMU), generador de nombres aleatoris veritables TRNG, funcionament CRC16/32; Admet la protecció contra escriptura (WRP), nivells de protecció de lectura múltiple (RDP) (L0/L1/L2); Admet l'inici de seguretat, la descàrrega de xifratge de programes i l'actualització de seguretat.
Suport per a la supervisió de fallades de rellotge i la supervisió antidemolició.
UID de 96 bits i UCID de 128 bits.
Entorn de treball altament fiable: 1,8 V ~ 3,6 V/-40 ℃ ~ 105 ℃.
(3) Patró industrial
El sistema electrònic de la carrosseria es troba en una fase inicial de creixement tant per a empreses estrangeres com nacionals. Les empreses estrangeres com ara BCM, PEPS, portes i finestres, controladors de seients i altres productes d'una sola funció tenen una profunda acumulació tècnica, mentre que les principals empreses estrangeres tenen una àmplia cobertura de línies de productes, cosa que els permet fer productes d'integració de sistemes. Les empreses nacionals tenen certs avantatges en l'aplicació de la carrosseria de vehicles de nova energia. Prenguem BYD com a exemple: en el vehicle de nova energia de BYD, la zona de la carrosseria es divideix en les zones esquerra i dreta, i el producte d'integració del sistema es reorganitza i es defineix. Tanmateix, pel que fa als xips de control de la zona de la carrosseria, el principal proveïdor de MCU continua sent Infineon, NXP, Renesas, Microchip, ST i altres fabricants internacionals de xips, i els fabricants nacionals de xips actualment tenen una baixa quota de mercat.
(4) Barreres industrials
Des de la perspectiva de la comunicació, hi ha el procés d'evolució de l'arquitectura tradicional (arquitectura híbrida) i la plataforma informàtica del vehicle definitiva. El canvi en la velocitat de comunicació, així com la reducció del preu de la potència de càlcul bàsica amb una alta seguretat funcional, és clau, i és possible aconseguir gradualment la compatibilitat de diferents funcions a nivell electrònic del controlador bàsic en el futur. Per exemple, el controlador de l'àrea de la carrosseria pot integrar les funcions tradicionals BCM, PEPS i anti-pinch d'ondulació. En termes relatius, les barreres tècniques del xip de control de l'àrea de la carrosseria són inferiors a les de l'àrea de potència, l'àrea de la cabina, etc., i s'espera que els xips domèstics prenguin la iniciativa per fer un gran avenç a l'àrea de la carrosseria i realitzin gradualment la substitució domèstica. En els darrers anys, el mercat de muntatge frontal i posterior de l'àrea de la carrosseria dels MCU domèstics ha tingut un molt bon impuls de desenvolupament.
Xip de control de cabina
L'electrificació, la intel·ligència i les xarxes han accelerat el desenvolupament de l'arquitectura electrònica i elèctrica de l'automòbil cap al control de domini, i la cabina de pilotatge també s'està desenvolupant ràpidament des del sistema d'entreteniment d'àudio i vídeo del vehicle fins a la cabina intel·ligent. La cabina de pilotatge es presenta amb una interfície d'interacció humà-ordinador, però tant si es tracta del sistema d'infoentreteniment anterior com de la cabina intel·ligent actual, a més de tenir un SOC potent amb velocitat de càlcul, també necessita una MCU d'alta velocitat en temps real per gestionar la interacció de dades amb el vehicle. La popularització gradual dels vehicles definits per programari, OTA i Autosar a la cabina intel·ligent fa que els requisits de recursos de MCU a la cabina siguin cada cop més alts. Reflectit específicament en la creixent demanda de capacitat FLASH i RAM, la demanda de recompte de PIN també està augmentant, les funcions més complexes requereixen capacitats d'execució de programes més fortes, però també tenen una interfície de bus més rica.
(1) Requisits del lloc de treball
La MCU a la zona de la cabina realitza principalment la gestió de l'energia del sistema, la gestió del temps d'engegada, la gestió de la xarxa, el diagnòstic, la interacció de dades del vehicle, la clau, la gestió de la retroil·luminació, la gestió del mòdul DSP/FM d'àudio, la gestió del temps del sistema i altres funcions.
Requisits de recursos de la MCU:
· La freqüència principal i la potència de càlcul tenen certs requisits, la freqüència principal no és inferior a 100 MHz i la potència de càlcul no és inferior a 200 DMIPS;
· L'espai d'emmagatzematge flash no és inferior a 1 MB, amb codi Flash i partició física Flash de dades;
· RAM no inferior a 128 KB;
· Alts requisits de nivell de seguretat funcional, podent assolir el nivell ASIL-B;
· Suport per a ADC multicanal;
· Suport per a CAN-FD multicanal;
· Regulació de vehicles Grau AEC-Q100 Grau 1;
· Suport per a l'actualització en línia (OTA), suport per a Flash de doble banc;
· Es requereix un motor de xifratge d'informació de nivell lleuger i superior SHE/HSM per afavorir un inici segur;
· El nombre de PIN no és inferior a 100 PIN;
(2) Requisits de rendiment
IO admet una font d'alimentació de voltatge ampli (5.5v ~ 2.7v), el port IO admet l'ús de sobretensió;
Moltes entrades de senyal fluctuen segons el voltatge de la bateria de la font d'alimentació i es pot produir una sobretensió. La sobretensió pot millorar l'estabilitat i la fiabilitat del sistema.
Vida de la memòria:
El cicle de vida del cotxe és de més de 10 anys, per la qual cosa l'emmagatzematge de programes i l'emmagatzematge de dades de la MCU del cotxe han de tenir una vida útil més llarga. L'emmagatzematge de programes i l'emmagatzematge de dades han de tenir particions físiques separades, i l'emmagatzematge de programes s'ha d'esborrar menys vegades, de manera que la resistència és > 10K, mentre que l'emmagatzematge de dades s'ha d'esborrar amb més freqüència, de manera que cal que tingui un nombre de vegades d'esborrat més gran. Consulteu l'indicador de flaix de dades. Resistència > 100K, 15 anys (<1K). 10 anys (<100K).
Interfície de bus de comunicació;
La càrrega de comunicació del bus al vehicle és cada cop més gran, de manera que el CAN CAN tradicional ja no satisfà la demanda de comunicació, la demanda del bus CAN-FD d'alta velocitat és cada cop més gran, i el suport a CAN-FD s'ha convertit gradualment en l'estàndard de MCU.
(3) Patró industrial
Actualment, la proporció de MCU de cabina intel·ligent domèstica encara és molt baixa, i els principals proveïdors continuen sent NXP, Renesas, Infineon, ST, Microchip i altres fabricants internacionals de MCU. Diversos fabricants nacionals de MCU han estat en el disseny, però el rendiment del mercat encara està per veure.
(4) Barreres industrials
El nivell de regulació del cotxe intel·ligent de cabina i el nivell de seguretat funcional no són relativament alts, principalment a causa de l'acumulació de coneixements tècnics i la necessitat d'iteració i millora contínues del producte. Al mateix temps, com que no hi ha moltes línies de producció de MCU a les fàbriques nacionals, el procés és relativament endarrerit i es triga un període de temps a aconseguir la cadena de subministrament de producció nacional, i pot haver-hi costos més elevats, i la pressió de la competència amb els fabricants internacionals és més gran.
Aplicació del xip de control domèstic
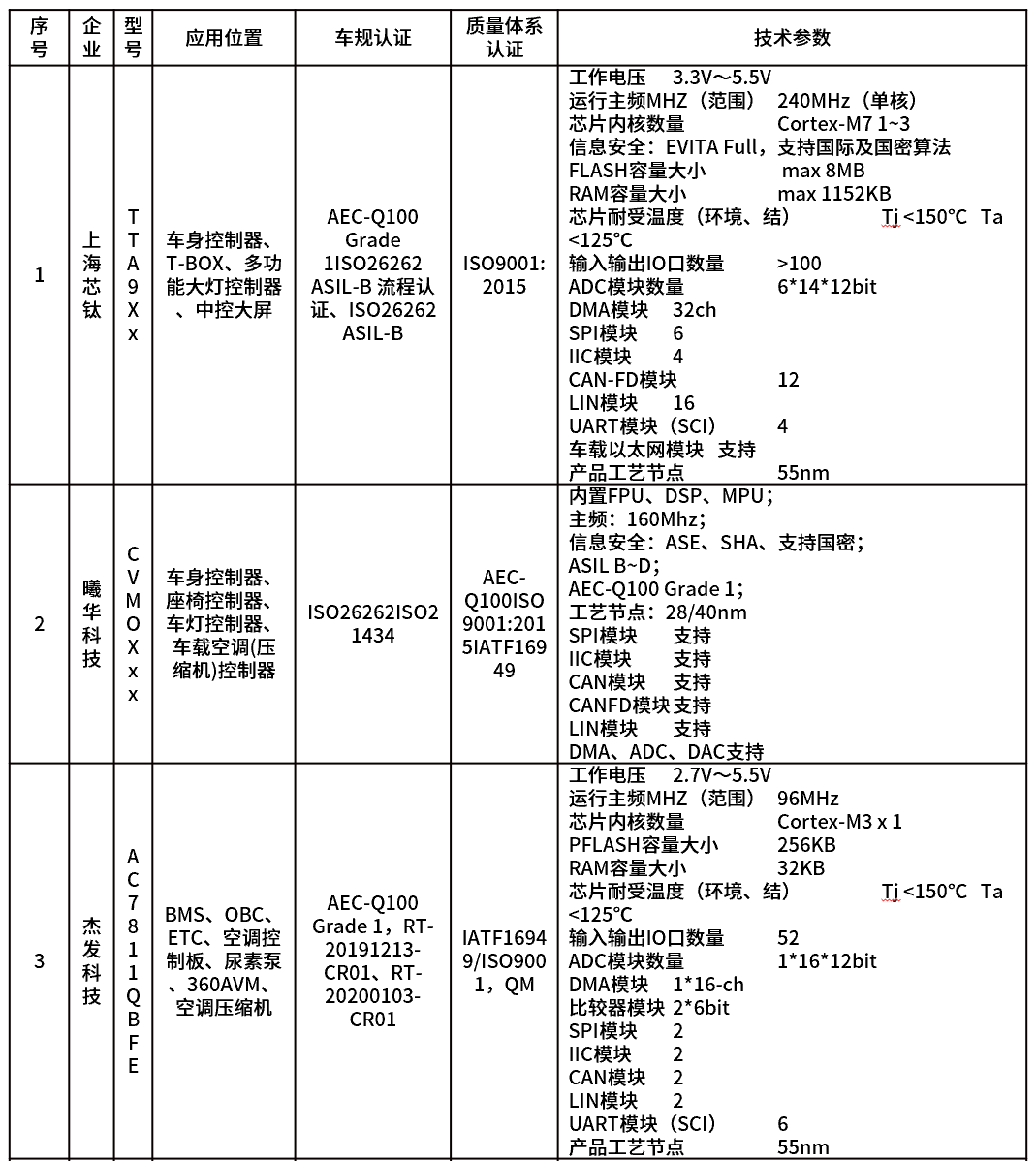
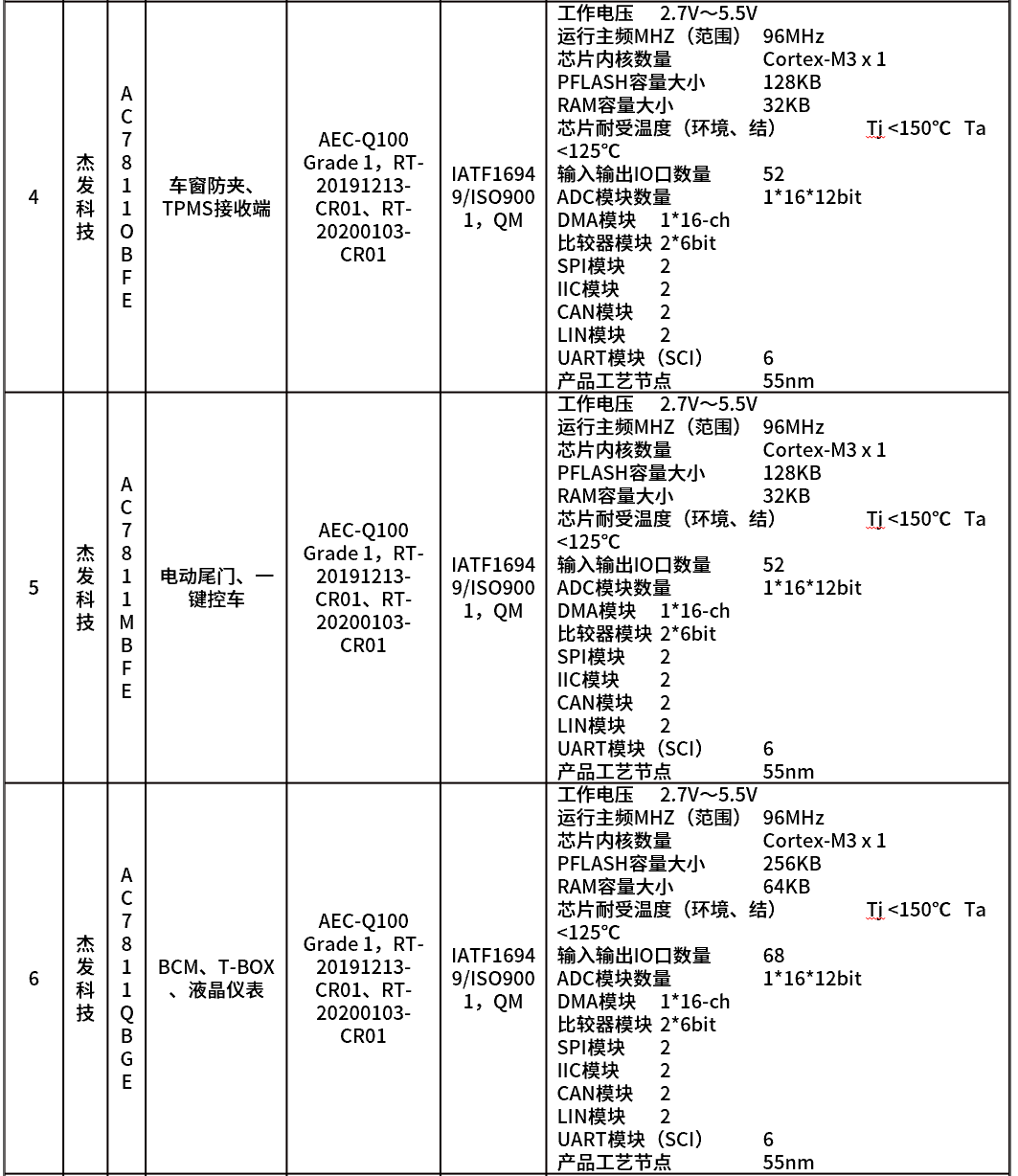
Els xips de control de cotxes es basen principalment en MCU per a cotxes. Empreses líders nacionals com ara Ziguang Guowei, Huada Semiconductor, Shanghai Xinti, Zhaoyi Innovation, Jiefa Technology, Xinchi Technology, Beijing Junzheng, Shenzhen Xihua, Shanghai Qipuwei, National Technology, etc., tenen seqüències de productes MCU a escala de cotxe, productes de referència de gegants estrangers, actualment basats en l'arquitectura ARM. Algunes empreses també han dut a terme investigació i desenvolupament de l'arquitectura RISC-V.
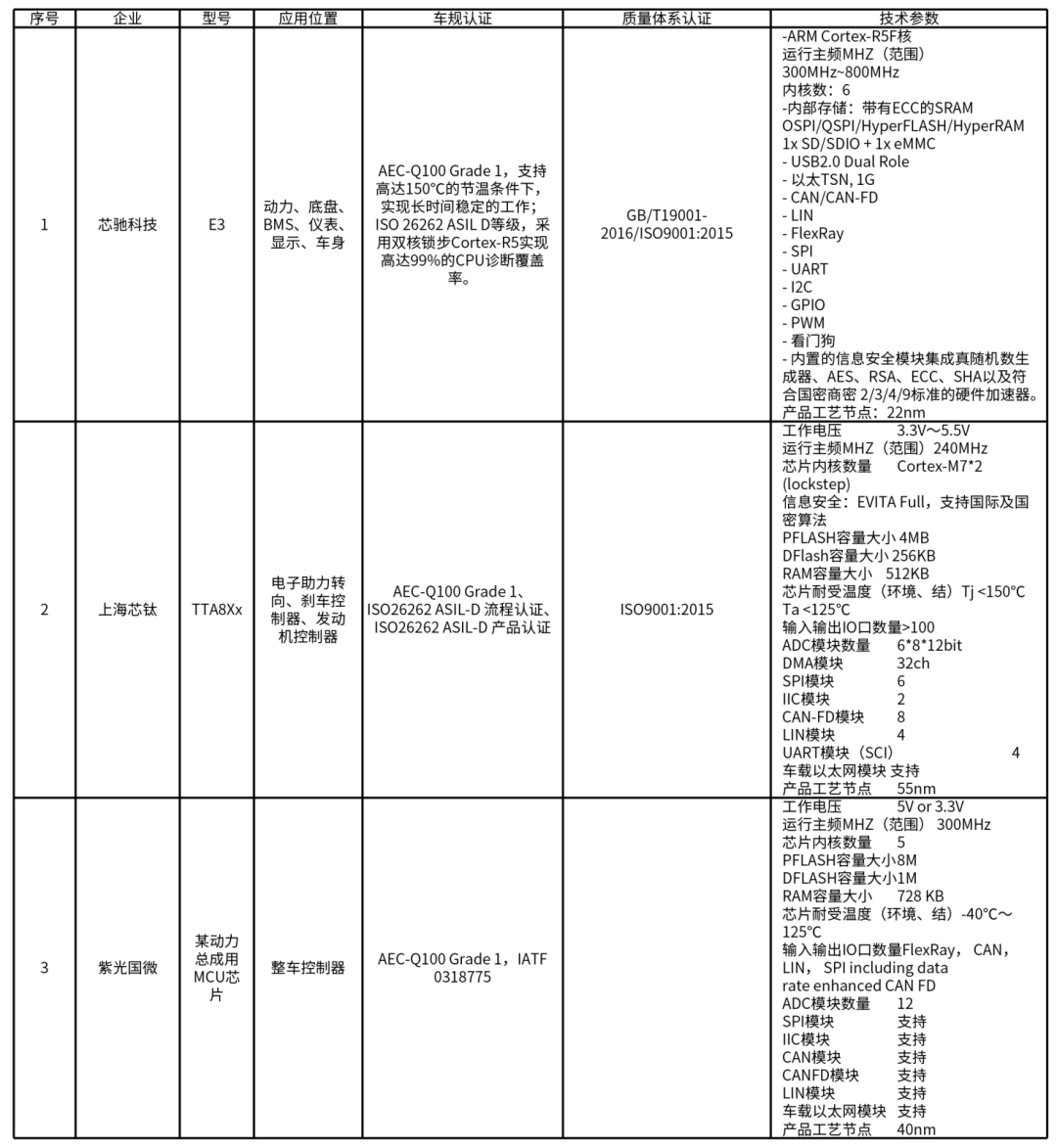
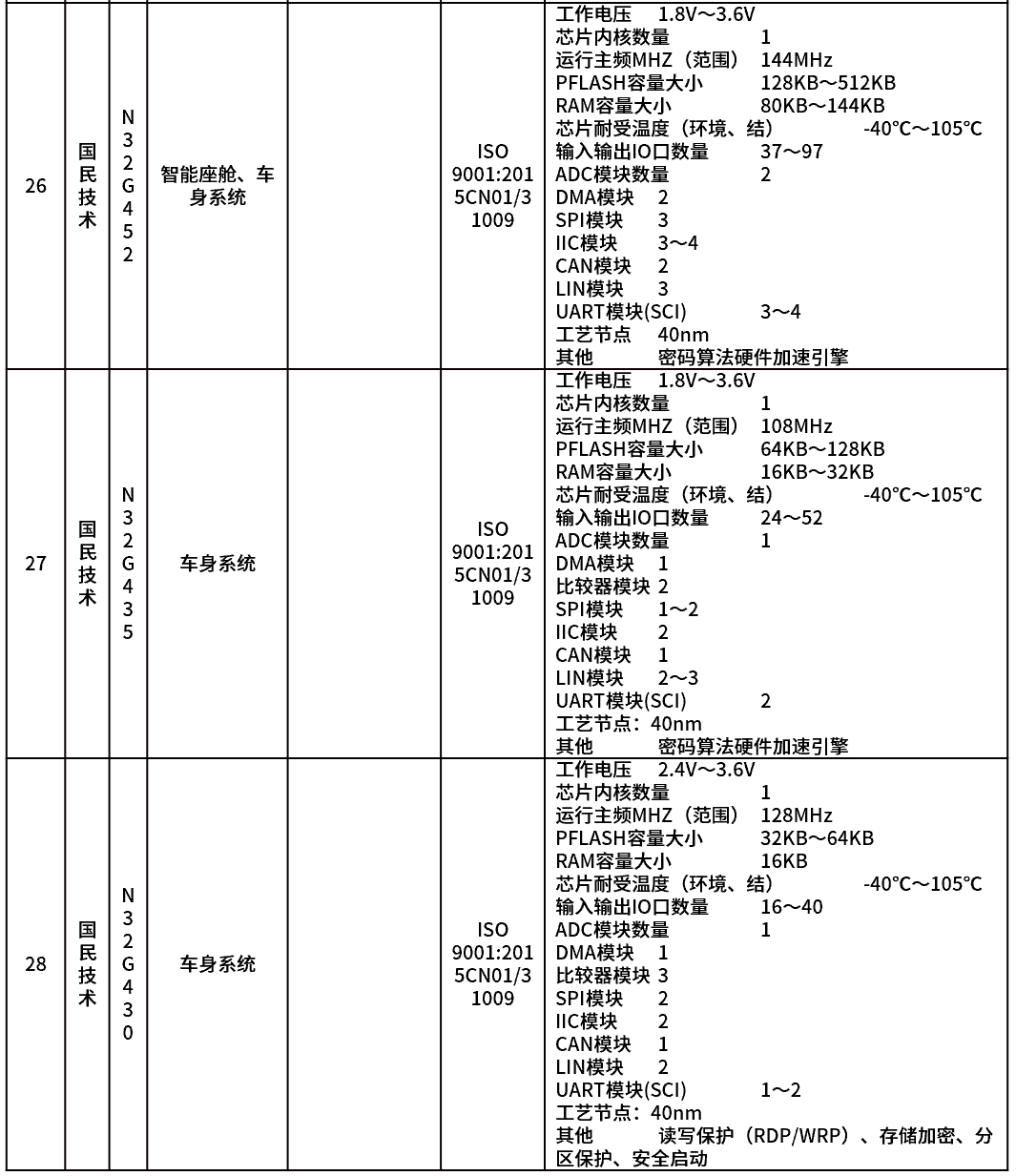
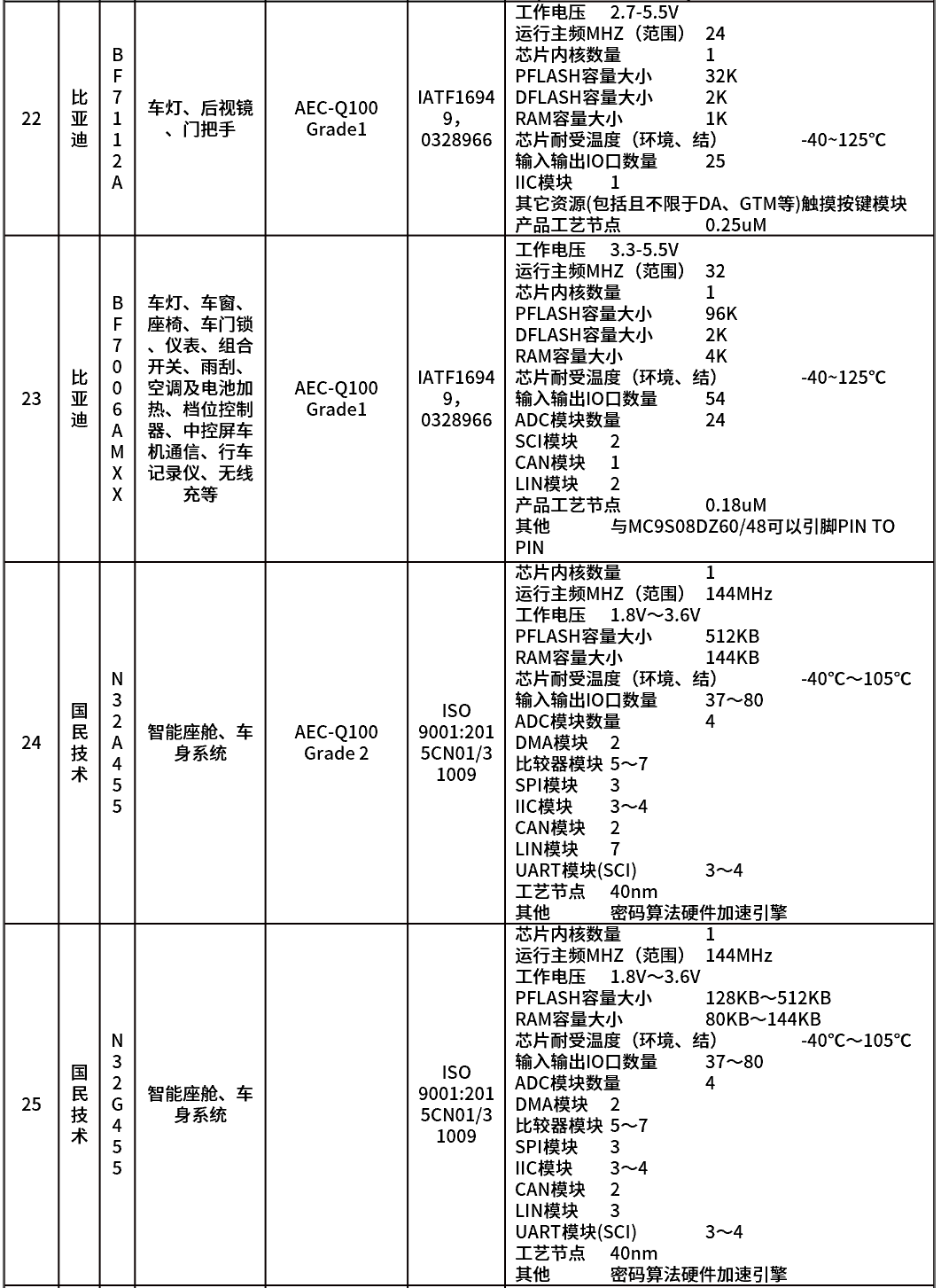
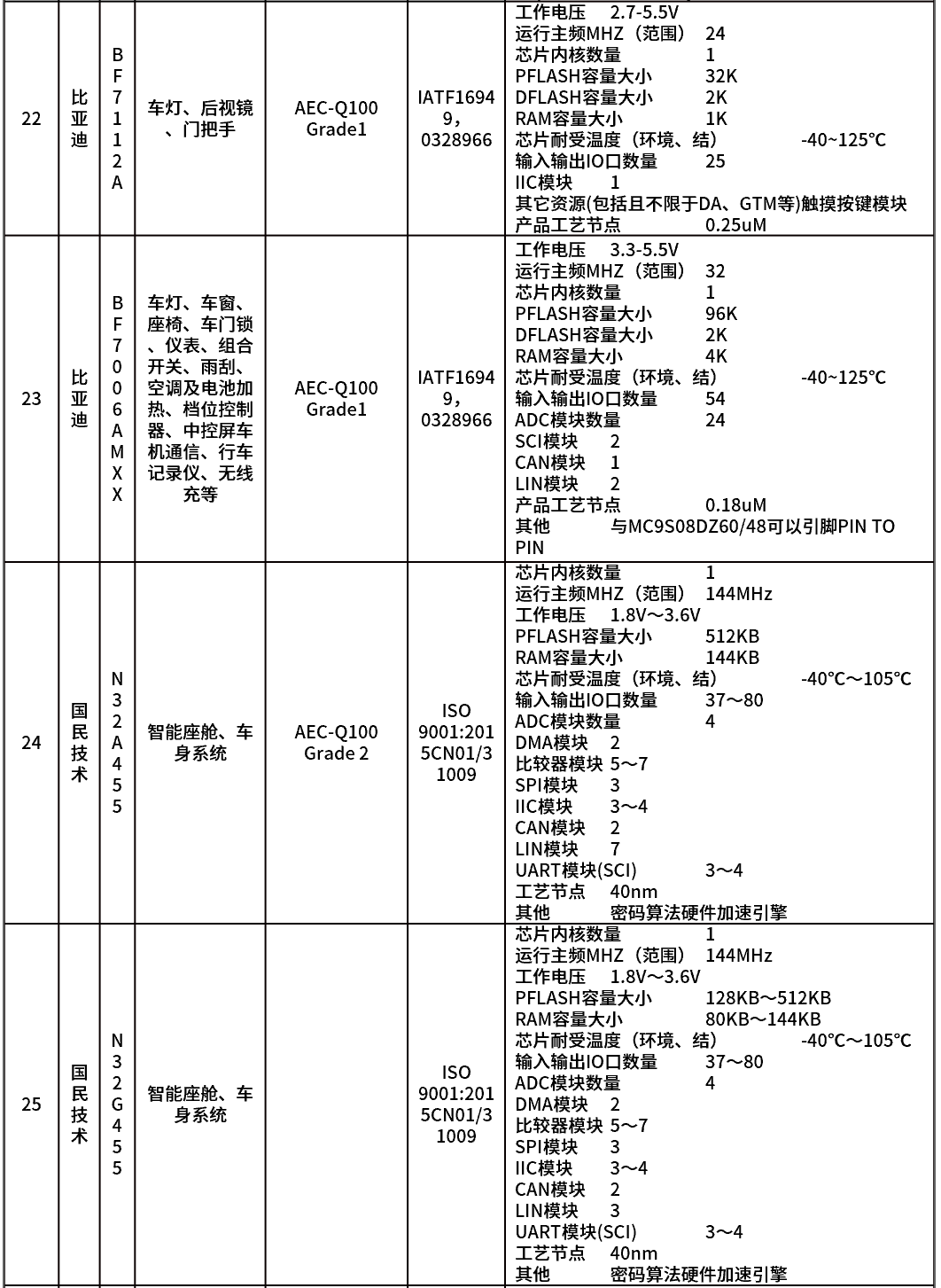
Actualment, el xip de domini de control de vehicles domèstics s'utilitza principalment al mercat de càrrega frontal d'automòbils i s'ha aplicat al cotxe en el domini de la carrosseria i el domini de l'infoentreteniment, mentre que en el domini del xassís, el domini de la potència i altres camps, encara està dominat per gegants de xips estrangers com ara stmicroelectronics, NXP, Texas Instruments i Microchip Semiconductor, i només unes poques empreses nacionals han realitzat aplicacions de producció en massa. Actualment, el fabricant nacional de xips Chipchi llançarà productes de la sèrie E3 de xips de control d'alt rendiment basats en ARM Cortex-R5F a l'abril de 2022, amb un nivell de seguretat funcional que arriba a ASIL D, un nivell de temperatura compatible amb AEC-Q100 Grau 1, una freqüència de CPU de fins a 800 MHz, amb fins a 6 nuclis de CPU. És el producte de més alt rendiment en el MCU de mesurament de vehicles de producció en massa existent, omplint el buit en el mercat nacional de MCU de mesurament de vehicles d'alt nivell de seguretat d'alta gamma, amb alt rendiment i alta fiabilitat, es pot utilitzar en BMS, ADAS, VCU, xassís by-wire, instruments, HUD, mirall retrovisor intel·ligent i altres camps bàsics de control de vehicles. Més de 100 clients han adoptat E3 per al disseny de productes, inclosos GAC, Geely, etc.
Aplicació de productes bàsics de controlador domèstic
Data de publicació: 19 de juliol de 2023





